Výzkumný tým se zabývá aplikovaným výzkumem a experimentálním vývojem v oblasti strojového a hlubokého učení pro řešení následujících úloh v průmyslových výrobách:
- extrakce vlastností z vizuálních a dalších dat,
- segmentace a shlukování dat,
- detekce, lokalizace a klasifikace objektů,
- automatizace a robotizace výrobních procesů.
Klíčová slova
Automatizace – Robotika – Strojové vidění – Umělá inteligence – Hluboké učení – Zpracování obrazu – Analýza signálu
Stálí členové výzkumného týmu
- prof. Ing. Petr Doležel, Ph.D.
- prof. Ing. Jan Mareš, Ph.D.
- doc. Ing. Dušan Kopecký, Ph.D.
- Ing. Daniel Honc, Ph.D.
- Ing. Dominik Štursa, Ph.D.
Probíhající projekty
| 2024 – 2028 | Mezisektorová a mezioborová spolupráce ve výzkumu a vývoji komunikačních, informačních a detekčních technologií pro řídicí a zabezpečovací systémy. MŠMT operační program JAK |
| 2024 – 2026 | Inovativní inteligentní video analytický systém pro 3D vizualizaci a monitorování stavu ochrany perimetru. TAČR, program TREND |
Ukončené projekty
| 2021 – 2023 | Výzkum a vývoj nové generace inteligentního systému FareOn NextGen. MPO, operační program PIK |
| 2021 – 2023 | Výzkum a vývoj modulární automatizované výrobní linky na bázi inovovaných robotických modulů a její aplikace na výrobu lékařských katetrů. MPO, operační program PIK |
| 2018 – 2022 | Spolupráce Univerzity Pardubice a aplikační sféry v aplikačně orientovaném výzkumu lokačních, detekčních a simulačních systémů pro dopravní a přepravní procesy (PosiTrans). MŠMT ČR, program OPVVV |
| 2020 – 2022 | Vývoj bezkontaktní technologie pro inteligentní ochranu zájmových prostor. MŠMT, program INTER-ACTION |
| 2020 – 2021 | Univerzální programovatelný obrazový senzor. TAČR, program GAMA |
| 2020 – 2021 | Vyšetření chuti v době epidemie COVID s využitím telemedicíny. TAČR, program GAMA |
| 2018 - 2020 | Vývoj technologie pro inteligentní řízení přepravních toků zboží. MPO, program Aplikace |
| 2020 – 2022 | Výzkum a vývoj inteligentního systému pro řízení tepelné úpravy potravin. MPO, program Aplikace |
Vybrané publikace
| Dolezel, Petr, Dominik Stursa, and Dusan Kopecky. Memory Efficient Deep Learning-Based Grasping Point Detection of Nontrivial Objects for Robotic Bin Picking. Journal of Intelligent & Robotic Systems 110 (3), 2024. |
| Dvorak, Miroslav, Petr Dolezel, Dominik Stursa, and Mohamed Chouai. Genetic Algorithm-Based Task Assignment for Fleet of Unmanned Surface Vehicles in Dynamically Changing Environment. Cybernetics and Systems 55 (6): 1314-1331, 2024 |
| Škrabánek, Pavel, Petr Doležel, and Radomil Matoušek. RGB images-driven recognition of grapevine varieties using a densely connected convolutional network. Logic Journal of the IGPL 31 (4): 618-633, 2023. |
| Dolezel, Petr, Pavel Skrabanek, Dominik Stursa, Bruno Baruque Zanon, Hector Cogollos Adrian, and Pavel Kryda. Centroid based person detection using pixelwise prediction of the position. Journal of Computational Science 63, 2022. |
| Rozsivalova, Veronika, Petr Dolezel, Dominik Stursa, and Pavel Rozsival. Sequence of U-Shaped Convolutional Networks for Assessment of Degree of Delamination Around Scribe. International Journal of Computational Intelligence Systems 15 (1), 2022. |
| Dolezel P., Holik F., Merta J., Stursa D. Optimization of a Depiction Procedure for an Artificial Intelligence-Based Network Protection System Using a Genetic Algorithm. Applied Sciences. 2021; |
| Rozinek O., Mareš J. The Duality of Similarity and Metric Spaces. Applied Sciences. 2021; 11(4):1910 |
| Stursa, D., Honc, D., Dolezel, P. Development of image procesing system for person detection, MM Science Journal, pp. 4000-4006, 2020. |
| Skrabanek, P., Dolezel, P., Nemec, Z., Stursa, D. Person Detection for an Orthogonally Placed Monocular Camera, Journal of Advanced Transportation, 2020. |
| Vrba, J., Mareš, J. Introduction to extreme seeking entropy, Entropy, 22 (1), p. 93, 2020. |
| Krbcova, Z., Kukal, J., Mares, J., Habartova, L., Setnicka, V. Variational approach to cancerous tissue identification from in vivo Raman spectra, Biomedical Signal Processing and Control, 49, pp. 520-527, 2019. |
| Dušek, F., Honc, D. Desired Terminal State Concept in Model Predictive Control: A Case Study, Journal of Control Science and Engineering, 2019. |
| Abraham, A., Pappa, N., Honc, D., Sharma, R. Reduced order modelling and predictive control of multivariable nonlinear process, Sadhana - Academy Proceedings in Engineering Sciences, 43 (3), 2018. |
| Dolezel, P., Heckenbergerova, J. Computationally simple neural network approach to determine piecewise-linear dynamical model, Neural Network World, 27 (4), pp. 351-371, 2017. |
| Mareš, J., Kukal, J., Hrnčiřík, P., Náhlík, J. Process state classification of fed-batch fermentation based on process variables analysis, Biochemical Engineering Journal, 112, pp. 178-185, 2016. |
Popis činnosti
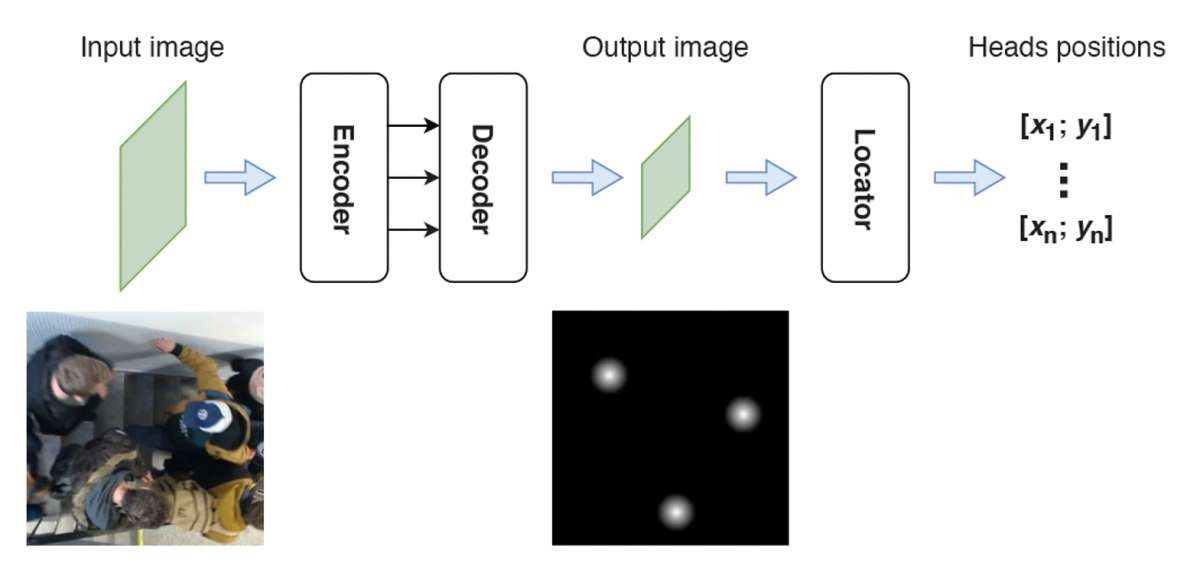
1. Observace pohybujících se objektů a osob
Observace a počítání cestujících v dopravních prostředcích je jedna ze základních funkcí monitorovacích systémů v městské hromadné dopravě. Využívá se pro dohledové systémy, predikci počtu cestujících, plánování dopravy i pro monitorování vytížení dopravních prostředků. Pro masové využití musí být monitorovací systémy nejen přesné, ale také levné. Na základě těchto požadavků vyvíjí výzkumný tým monitorovací systém pro observaci pohybujících se objektů a osob za použití RGB kamerového senzoru umístěného nad snímaným prostorem směrem kolmo dolů. Takto umístěný senzor eliminuje možnost překrytí objektů zájmu a zároveň při snímání osob neumožňuje identifikaci jedinců, čímž se zjednodušuje legislativní proces uvedení monitorovacího systému do provozu.
V rámci výzkumné činnosti je jádro monitorovacího systému vyvíjeno jednak na bázi klasických metod zpracování obrazu (histogramy orientovaných gradientů, detekce hran, detekce obrazců binárních oblastí, …) v kombinaci s posuvným oknem (window sliding) a skupinou rozhodovacích algoritmů (metoda podpůrných vektorů, vícevrstvý perceptron, konvoluční neuronová síť), ale také pomocí unikátního přístupu plně konvoluční neuronové sítě. Tato síť transformuje vstup z kamerového senzoru bez jakýchkoliv mezikroků na schématický obraz tvořený gradientními koulemi a pozadím, kde gradientní koule definují pozici zájmových objektů ve sledovaném prostoru. V této oblasti v současnosti výzkumný tým pracuje s různými variantami plně konvoluční neuronové sítě U-Net s cílem najít optimální topologii z hlediska přesnosti poskytovaného řešení i výpočetní náročnosti.
Aplikace tohoto přístupu jsou vyvíjeny pro observaci osob ve veřejných prostorech, prostředcích městské hromadné dopravy, ale i pro bezpečnostní využití při ochraně zájmových prostor před drony nebo bezpilotními letouny.
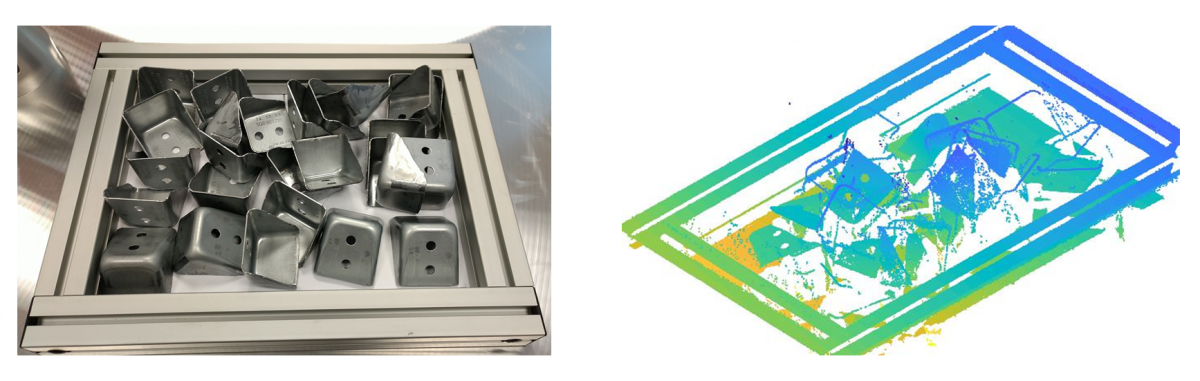
2. Klasifikace a lokalizace objektů pro automatickou manipulaci v průmyslových výrobách
Snahou v rámci modernizace průmyslových výrob je ve velké míře zavádění automatizace, to znamená odstraňování lidských činností v rámci výroby. Z pohledu pokročilých aplikací robotiky v této oblasti je klíčovým úkolem řešení problému „Pick and Place“, tedy uchopení předmětu robotem a jeho přenesení na určené místo. V případě neznáme polohy a orientace předmětu v kombinaci se složitým tvarem a různými typy objektů k manipulaci se jedná o netriviální úlohu, která v praxi bývá řešena jen pro specifické podmínky panující v konkrétní výrobě.
V rámci řešení je nejprve třeba určit vhodné robotické rameno se specifickým gripperem pro uchycení předmětů. Pomocí systému počítačového vidění je následně třeba stanovit polohy a orientace předmětů v prostoru a v návaznosti na to vybrat vhodný předmět k manipulaci včetně optimálního bodu uchopení v prostoru. Posledním krokem je pak plánování pohybu robotického ramene s gripperem za účelem přemístění vybraného objektu do definované polohy. V současné době se výzkumný tým zabývá efektivním způsobem klasifikace, detekce a lokalizace zájmových objektů v prostoru s využitím klasických metod typu ICP algoritmu, ale i pomocí plně konvolučních neuronových sítí s využitím různých druhů senzorů (RGB, IR, ToF, laser).