The research team deals with applied research and experimental development in the field of machine and deep learning for solving problems in industrial productions such as:
- extraction of properties from visual and other data,
- data segmentation and clustering,
- detection, localization and classification of objects,
- automation and robotization of production processes.
Key words
Automation – Robotics – Machine Vision – Artificial intelligence – Deep Learning – Image Processing – Signal Analysis
Research Team members
- prof. Ing. Petr Doležel, Ph.D.
- prof. Ing. Jan Mareš, Ph.D.
- doc. Ing. Dušan Kopecký, Ph.D.
- Ing. Daniel Honc, Ph.D.
- Ing. Dominik Štursa
Projects being solved
| 2024 - 2028 | Intersectoral and interdisciplinary cooperation in research and development of communication, information and detection technologies for control and security systems, MEYS CR, programme OPJAK |
| 2024 - 2026 | An Innovative Intelligent Video Analytics System for 3D Surveillance and Perimeter Protection Monitoring, TA CR, programme TREND |
| 2021 - 2023 | Research and development of the next generation of FareOn NextGen intelligent system, MPO, programme OPPIK |
| 2021 - 2023 | Research and development of a modular automated production line based on innovative robotic modules and its application for the production of medical catheters, MPO, programme OPPIK |
| 2018 – 2022 | Cooperation in Applied Research between the University of Pardubice and companies, in the Field of Positioning, Detection and Simulation Technology for Transport Systems (PosiTrans). MEYS CR, programme OPVVV |
| 2020 – 2022 | Artificial intelligence enabled smart contactless technology development for smart fencing. MEYS CR, programme INTER-ACTION |
| 2020 – 2021 | Universal Programmable Image Sensor. TA CR, programme GAMA |
| 2020 – 2021 | Examination of taste during the COVID epidemic using telemedicine. TA CR, programme GAMA |
| 2018 - 2020 | Technology development for intelligent traffic flow. MIT, programme Applications |
| 2020 – 2022 | Research and development of intelligent system for control. MIT, programme Applications |
Selected publications
| Dolezel, Petr, Dominik Stursa, and Dusan Kopecky. Memory Efficient Deep Learning-Based Grasping Point Detection of Nontrivial Objects for Robotic Bin Picking. Journal of Intelligent & Robotic Systems 110 (3), 2024. |
| Dvorak, Miroslav, Petr Dolezel, Dominik Stursa, and Mohamed Chouai. Genetic Algorithm-Based Task Assignment for Fleet of Unmanned Surface Vehicles in Dynamically Changing Environment. Cybernetics and Systems 55 (6): 1314-1331, 2024 |
| Škrabánek, Pavel, Petr Doležel, and Radomil Matoušek. RGB images-driven recognition of grapevine varieties using a densely connected convolutional network. Logic Journal of the IGPL 31 (4): 618-633, 2023. |
| Dolezel, Petr, Pavel Skrabanek, Dominik Stursa, Bruno Baruque Zanon, Hector Cogollos Adrian, and Pavel Kryda. Centroid based person detection using pixelwise prediction of the position. Journal of Computational Science 63, 2022. |
| Rozsivalova, Veronika, Petr Dolezel, Dominik Stursa, and Pavel Rozsival. Sequence of U-Shaped Convolutional Networks for Assessment of Degree of Delamination Around Scribe. International Journal of Computational Intelligence Systems 15 (1), 2022. |
| Dolezel P., Holik F., Merta J., Stursa D. Optimization of a Depiction Procedure for an Artificial Intelligence-Based Network Protection System Using a Genetic Algorithm. Applied Sciences. 2021; 11(5):2012 |
| Rozinek O., Mareš J. The Duality of Similarity and Metric Spaces. Applied Sciences. 2021; 11(4):1910 |
| Stursa, D., Honc, D., Dolezel, P. Development of image procesing system for person detection, MM Science Journal, pp. 4000-4006, 2020. |
| Skrabanek, P., Dolezel, P., Nemec, Z., Stursa, D. Person Detection for an Orthogonally Placed Monocular Camera, Journal of Advanced Transportation, 2020. |
| Vrba, J., Mareš, J. Introduction to extreme seeking entropy, Entropy, 22 (1), p. 93, 2020. |
| Krbcova, Z., Kukal, J., Mares, J., Habartova, L., Setnicka, V. Variational approach to cancerous tissue identification from in vivo Raman spectra, Biomedical Signal Processing and Control, 49, pp. 520-527, 2019. |
| Dušek, F., Honc, D. Desired Terminal State Concept in Model Predictive Control: A Case Study, Journal of Control Science and Engineering, 2019. |
| Abraham, A., Pappa, N., Honc, D., Sharma, R. Reduced order modelling and predictive control of multivariable nonlinear process, Sadhana - Academy Proceedings in Engineering Sciences, 43 (3), 2018. |
| Dolezel, P., Heckenbergerova, J. Computationally simple neural network approach to determine piecewise-linear dynamical model, Neural Network World, 27 (4), pp. 351-371, 2017. |
| Mareš, J., Kukal, J., Hrnčiřík, P., Náhlík, J. Process state classification of fed-batch fermentation based on process variables analysis, Biochemical Engineering Journal, 112, pp. 178-185, 2016. |
Research activities in detail
1. Observation of moving objects and people
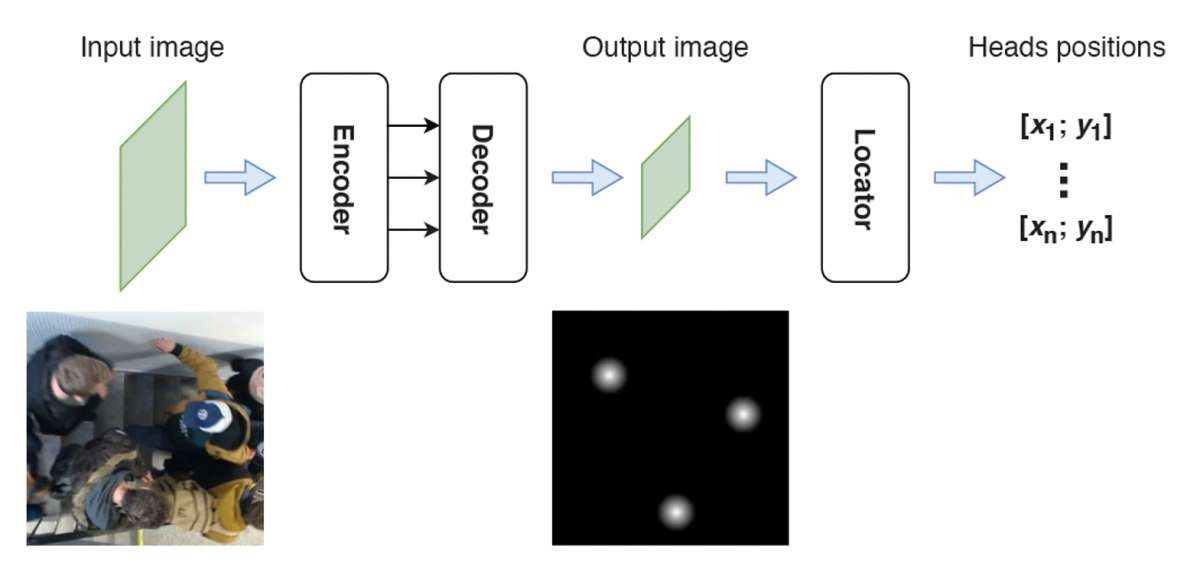
Passenger observation and counting in transport vehicles is one of the basic functions of the monitoring systems in public transport. It is used for surveillance systems, prediction of the number of passengers, traffic planning and for vehicle utilization monitoring. Monitoring systems must not only be accurate but also inexpensive. Based on these requirements, the research team is developing a monitoring system for observing moving objects and people using an RGB camera sensor located vertically downwards above the scanned area. The sensor placed in this way eliminates the possibility of overlapping objects of interest and at the same time does not allow the identification of individuals when scanning people. This simplifies the legislative process of putting the monitoring system into operation.
The monitoring system is developed on the basis of classical image processing methods (histograms of oriented gradients, edge detection, detection of binary area patterns,…) in combination with a sliding window and a group of decision algorithms like supporting vector method, multilayer perceptron and convolutional neural network. The research team is using a unique approach of a fully convolutional neural network transforming the input from the camera sensor without any intermediate steps into a schematic image formed by gradient spheres and background. The gradient spheres define the position of objects of interest in the monitored space. The research team is currently working on variants of the fully convolutional neural network U-Net in order to find the optimal topology in terms of accuracy of the provided solution and computational complexity.
Applications of this approach are already not only being developed for the observation of people in public spaces, public transport vehicles, but also for safety applications in the protection of areas of interest from drones or unmanned aerial vehicles.
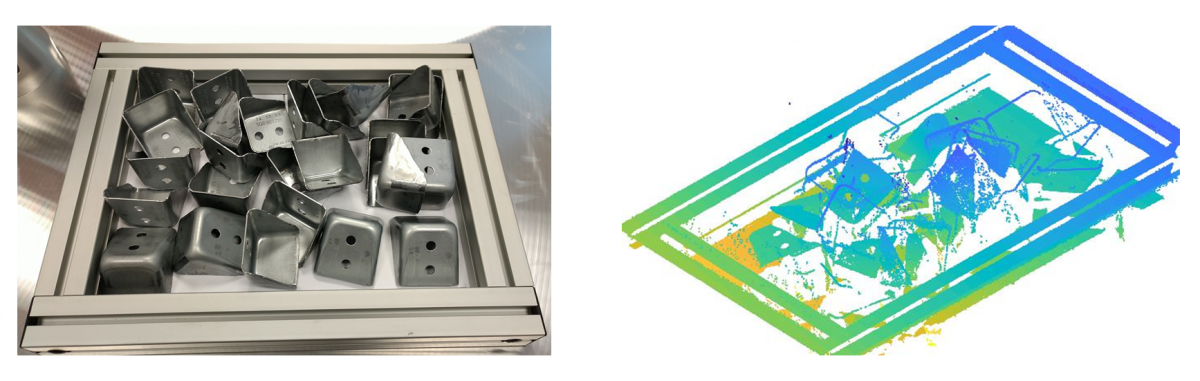
2. Classification and localization of objects for automatic manipulation in industrial production
The "Pick and Place" problem is one of the key tasks to solve in the process of modernization of industrial production with automation and advanced robotics. The goal is to grasp the object by a robot and transfer it to a designated position. In combination with a complex object shape which has to be manipulated this is a non-trivial task in the case of an unknown position and orientation. In practice it is solved only for specific conditions in a particular production line. As part of the solution, it is necessary to choose an appropriate robotic arm with a specific gripper suitable for object holding. Then it is necessary to determine the positions and orientations of objects by using a suitable computer vision system and to select one object to pick together with its optimal grip point. The last step is to plan the movement of the robotic arm in order to elevate the object and place it into defined position. Currently, the research team is dealing with an effective way of classification, detection and localization of objects of interest in 3D space using a classical method such as ICP algorithm, but also using fully convolutional neural networks and various types of sensors (RGB, IR, ToF, laser).